In physics and mathematics, we generally deal with two kinds of quantities and these quantities are:
- Scalar
- Vector
Scalar
A scalar is a quantity that has a magnitude only.
e.g. Temperature, Time, Length, Distance, Speed, etc.
Vector
Quantities that have magnitude and direction both are called vectors.
e.g. velocity, force momentum, torque, electric field, etc.
Illustration #1: Velocity Vector and Speed Relation
A velocity vector has a magnitude and a direction, its magnitude is called speed.
Notation
A vector ‘A’ is denoted by an arrow sign on the top. (i.e. $\vec{A}$)
Physically, it is denoted by an arrow, where the tail of the arrow denotes the initial point and the tip denotes the terminal point.
——-> A
The length of the arrow tells us about its ‘magnitude’ and the tip of the arrow tells us about its ‘direction’.
Components of a Vector
A vector $\vec{A}$ in 3 dimensions can be represented with tail at origin ‘O’ of a cartesian coordinate system.
If (A1, A2, A3) is the terminal (ending) point of a vector $\vec{A}$, then it can be written as:
$\vec{A}$ = A1$\hat{i}$ + A2$\hat{j}$ + A3$\hat{k}$
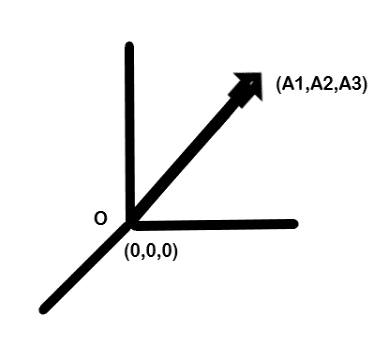
Here, A1$\hat{i}$, A2$\hat{j}$, A3$\hat{k}$ are called rectangular component vectors or components of vector A.
Calculating Magnitude of a Vector
Magnitude denotes the length of a vector.
Suppose we have $\vec{A}$ = A1$\hat{i}$ + A2$\hat{j}$ + A3$\hat{k}$,
then, the magnitude of $\vec{A}$ = |$\vec{A}$| = $\sqrt{A1^{2}+A2^{2}+A3^{2}}$
Illustration #2: Equal Vectors
Vectors A & B are said to be equal only if they have the same magnitude (or length) and the same direction.
——-> A
——-> B
Types of Vectors
1. Unit Vector
A vector having ‘unit’ magnitude is called a unit vector. It is denoted by $\hat{A}$.
$\hat{i}$, $\hat{j}$, $\hat{k}$ are called rectangular unit vectors.
Unit vector along the vector $\vec{A}$ = $\frac{\vec{A}}{|\vec{A}|}$
2. Polar Vectors
Linear vectors are also called polar vectors. These vectors always directed towards some point.
e.g. force acceleration, velocity, etc.
3. Axial Vectors
Vectors that are associated with rotation about an axis are known as axial vectors.
e.g. torque, angular momentum, etc.
4. Null Vectors
Vectors having zero magnitudes are called null vectors, i.e. their tail and tip coincide with each other.